We are pleased to share with you the article ‘Collaborative workcell in industrial assembly process with online ergonomics monitoring‘, which was presented for the first time at I-RIM Conference 2022 as part of the Bimu exhibition.
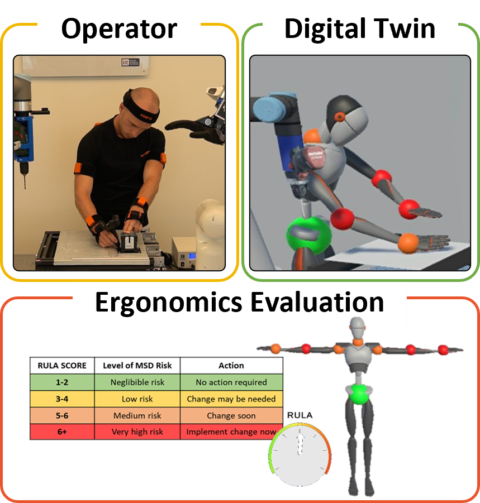
With the advent of Industry 4.0, new technologies such as collaborative robots are introduced to provide welfare beyond jobs and growth. To be effective, the collaboration between humans and robots should be safe, intuitive and stable. Safe collaboration does not only mean avoiding human-robot contact; the operator must also feel confident during the collaboration with the robot and avoid incorrect postures (physical ergonomics). This work analyzed an industrial use case related to automating manual tasks in production processes. We propose a collaborative workcell design which integrates a solution to real-time remote control of the operator’s ergonomics in an interactive environment. The platform is tested in a real use case that involves several mechanical tasks in different scenarios, with and without the support of the robot. The results show improvements in both the operator’s working conditions when supported by robots and the overall efficiency of the process.
This scientific article is linked to developing the Robotic Assistant use case, one of the strands investigated in the JOiiNT LAB project.
You can read the article in full:
Link to Zenodo Repository